

Early in the FIRST Tech (FTC) season, our team began the process of understanding what obstacles we’d have to overcome in the new 2022-2023 season’s PowerPlay challenge by driving one of last year’s robots, Petunia (20799) on the new playing field. We updated our playing field from last year which is a makeshift construction built largely from plywood for the walls and was only two-thirds the full field. This gave us enough to practice and test the robots on but also had some limitations that became apparent later in the season.
Fortunately, Petunia (20799) from last season was already somewhat well-suited for the new challenge. Petunia had a compact chassis and a long arm with a custom-designed and fabricated grabber claw that helped her make it to the Southern California Regional competition last year. While her reach wasn’t enough for the tallest of PowerPlay’s junctions, we learned that her grabber worked well with the game elements and would just need a new slide mechanism to allow us to quickly place cones throughout the playing field.
We had several extra 3d-printed claws on hand from last season that were ready to test on King Bob, they just needed a new mounting plate. The team got right to work on 3d-modeling a new attachment plate using a couple of different 3D-modeling programs, Rhinoceros and Autodesk Fusion. The whole team is learning Fusion this year but we began with Rhinoceros and OnShape last season with Rhinoceros being well-suited to the curved forms of the grabber. The result is a product of multiple software packages and team member’s hard work and was 3D-printed using a Prusa 3D-printer which quickly produced a high-quality part.

CyberDragons Petunia (20799) | 2021-2022 Season

Petunia’s Old Grabber Claw on King Bob
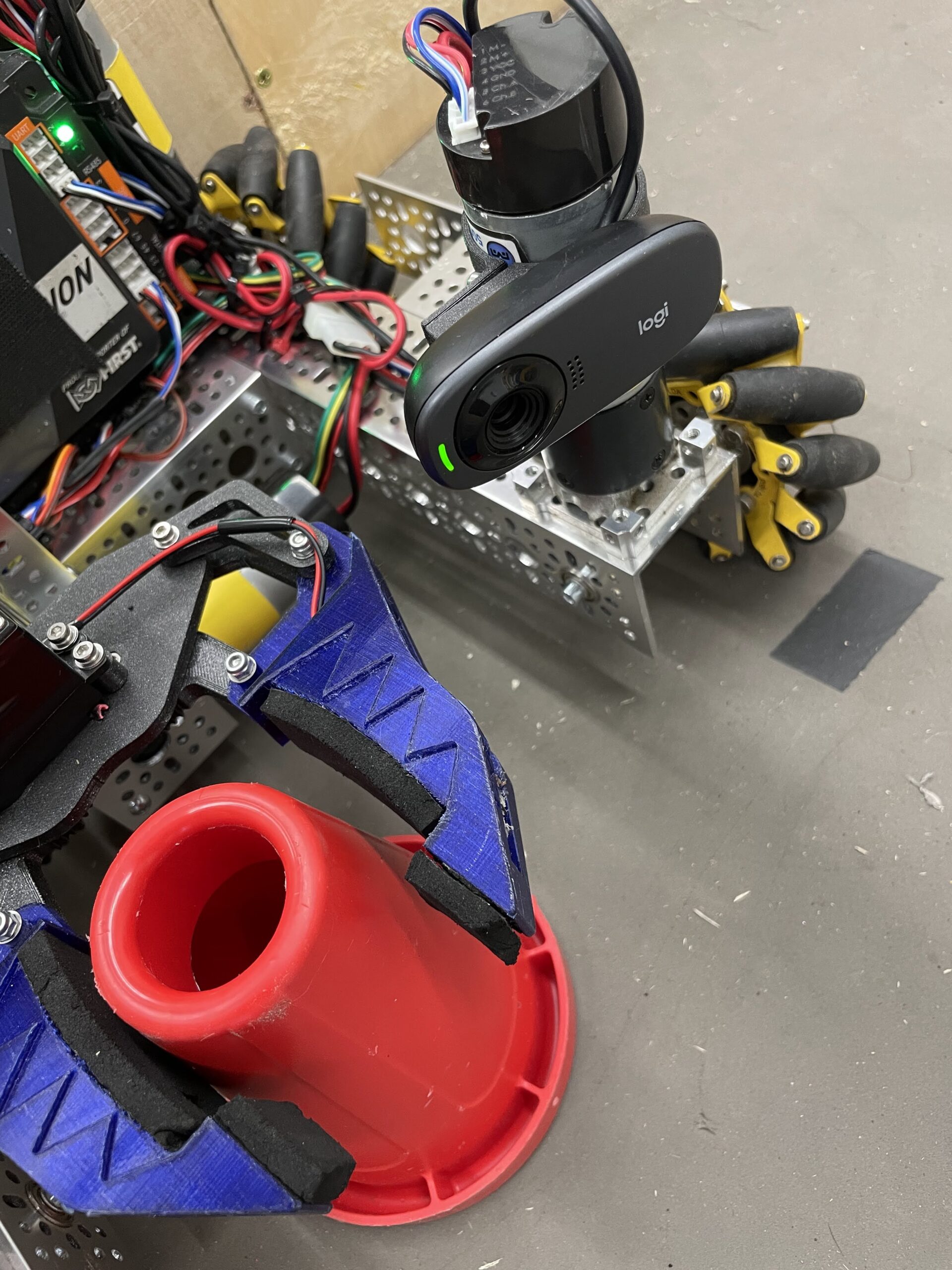
Petunia’s Old Claw on King Bob
After some additional driving and testing with the old blue claws on the new King Bob (20799) chassis we also found that the original claws were a bit longer than needed and a quick trim of the 3D modeled parts in Rhinoceros by the team was all it took to modify the component. Some shiny new yellow filament in the Prusa 3D-printer seemed to match the color scheme already established by our GoBilda components so we rolled forward with that. We even added a hole to place a plastic flame in the grabber to simulate a fire-breathing dragon!

In the above photo you can see the final 3D print of the new grabber. This works pretty well for our needs at the moment but we’re looking at adding back in the line break sensor that we used last season to send visual and haptic feedback to the gamepads so the drivers know when they have a cone in the grabber’s mouth and we can also implement an auto-close feature similar to last season as well.
Stay tuned for more posts on our progress with King Bob and learn about how we’re working together between both teams (including Marvinette 9887) and applying what we implement and test on one robot to the other.


0 Comments